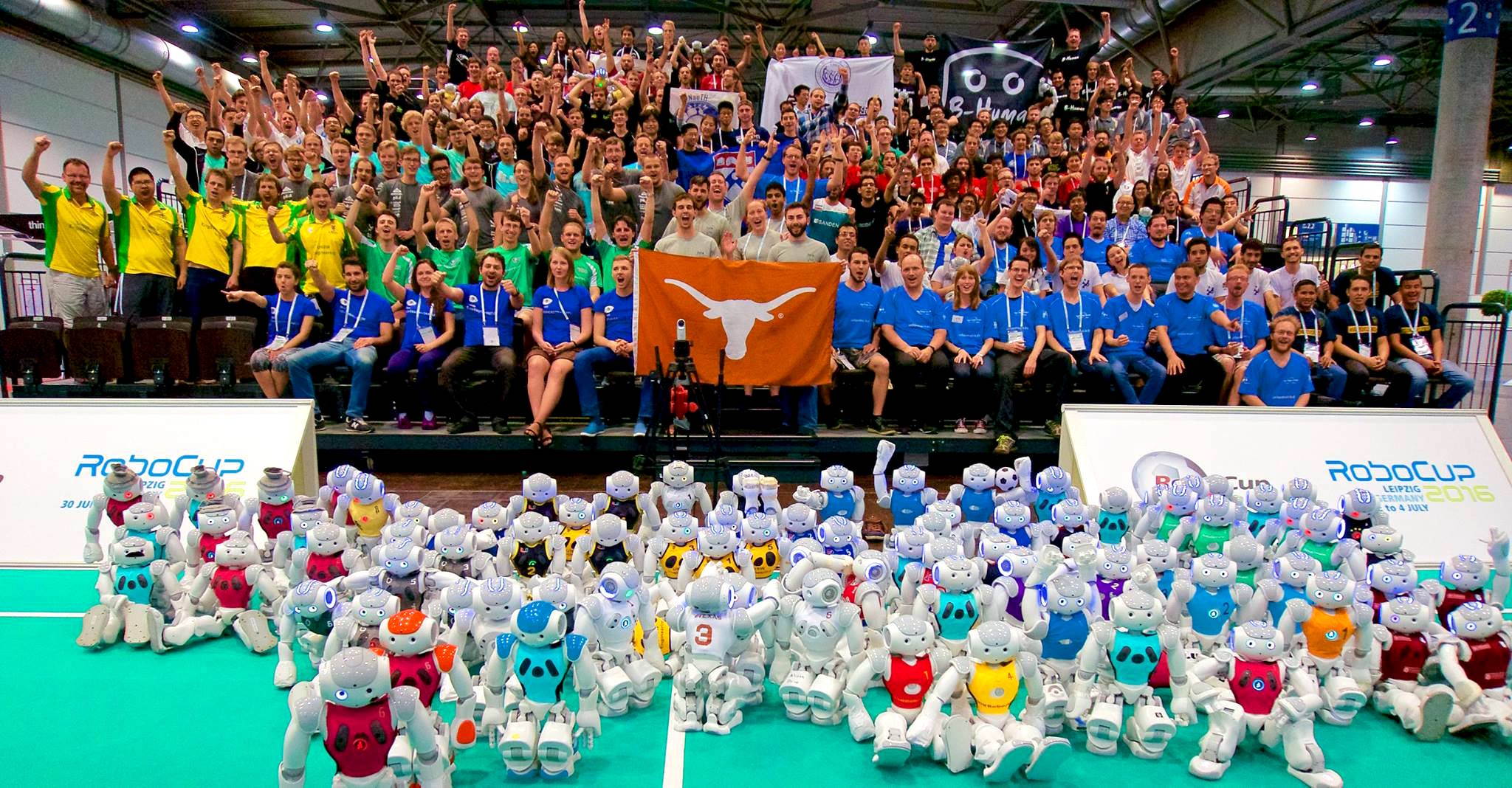
RoboCup is an organization and autonomous robotics competition. Teams from across the world develop autonomous robots that compete in soccer games. The primary goal of RoboCup is to advance research in robotics and artificial intelligence.
See this article from the UT CS department titled UT Austin Villa Wins at 2016 World RoboCup for more details!
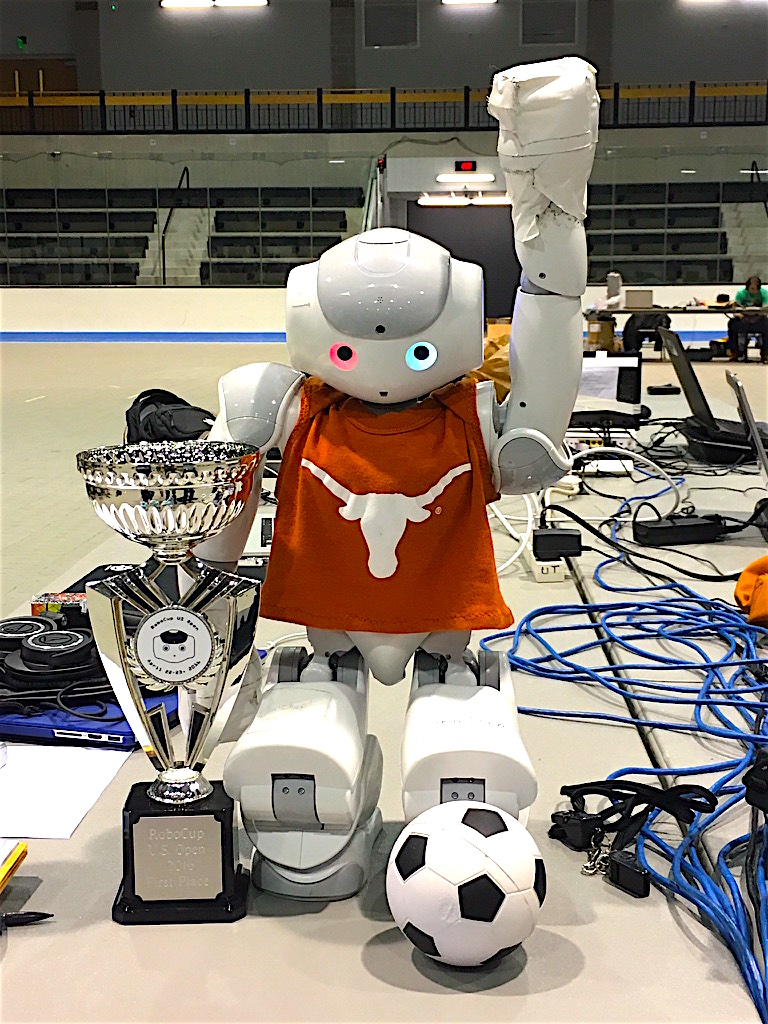
The federation changes the rules every year by introducing new challenges. In previous years, the ball was a bright, solid orange. This year (2016), the league switched to a new, more traditional white ball with black pentagons.
My task was to design and implement a new computer vision algorithm for detecting the ball. One of the most challenging aspects of this task is the vision pipeline must run in real time (less than 30 Hz) on relatively weak hardware.
Many teams had trouble seeing the ball this year. Our team's ball detection was very good.
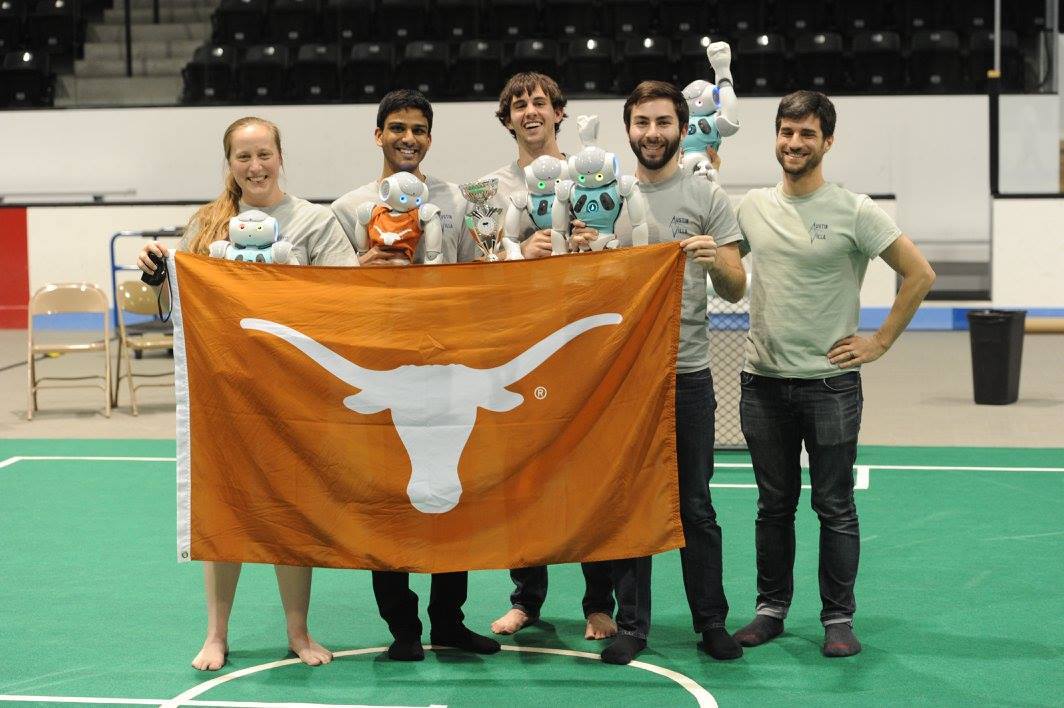
Our team was invited as special guests to the Asia-Pacific compeition held in Beijing, China in October 2016. We won 1st place! This competition was part of the larger World Robot Conference.
This video from Reuters describes the event.
This video is a short interview with me by a local Austin news network.
Our team won 2nd place in the 2016 international RoboCup competition in Leipzig, Germany.
Finals against the B-Human team
Semi finals against the Nao-Team HTWK team
Game against the Australian UNSW team (commentary in English)